
Graphical Simulation and Virtual Robotics
Overview
|
We are currently building a
large-scale software simulation framework for the development and testing
of high-level behaviors for complex robots such as humanoids.
Physically-based simulation software is commonly used for developing and testing low-level robot control algorithms. In order to facilitate the development and evaluation of higher-level robot behaviors, broader-based simulations are needed. Software for 3D perception, motion planning for obstacle avoidance, and algorithms for integrating vision and planning are needed in order for the autonomous operation of humanoid robots. In addition to modeling the general interaction between the robot and its environment, the simulation software can be used as a graphical user interface for directly controlling or interacting with a robot operating in the real world. We view this as a useful tool for the visualization and development of robotic systems, as well as an interactive, task-level programming interface for robots. |
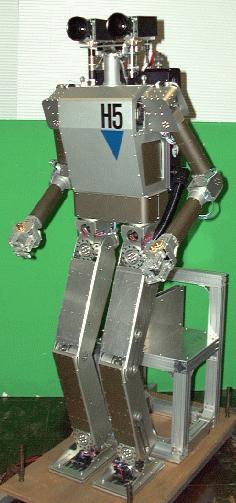
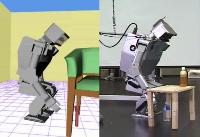
The Real Dynamic Humanod "H5" |
The Virtual Model of "H5". |
Simulation Environment
|
|
|
The simulation environment we are developing
allows the user to interactively control a virtual model of a humanoid.
The software components include modeling of the robot
geometry and kinematics, simulated stereo visual sensing, and
motion planning.
High-level behavior programming is done through a simple scripting language that allows function aggregation to build up complex behavior activities. The software framework includes subsystems for full-body inverse kinematics and posture planning, overall body dynamic stability and control simulation, and integrated simulated sensing. In addition to providing a testbed for programming humanoids, the simulation environment serves as a graphical user interface (GUI) for controlling the real robot hardware interactively. |
|
 Dynamically-stable, full-body motion planning |
|